anko
Well-known member
There was some discussion back and forth today, regarding the off the line performance of the E-motors. It was said that measurements were no good as long as we could not plot the development of output over time. SO, I spent a little time building a dedicated logger for:
- Front motor RPM
- Front motor Torque
- Rear motor RPM
- Rear motor Torque
- Generator RPM
- Generator Torque
By making this dedicated, I could reduce my sweep time to about a third of a second, resulting in some interesting pictures.
First attempt:
- Engine warmed up and running (the teal trace shows how the generator is used to start the engine (spike up) and then starts producing power.
- Foot on the brake
- Then move foot away from brake to throttle and hit it as hard as possible
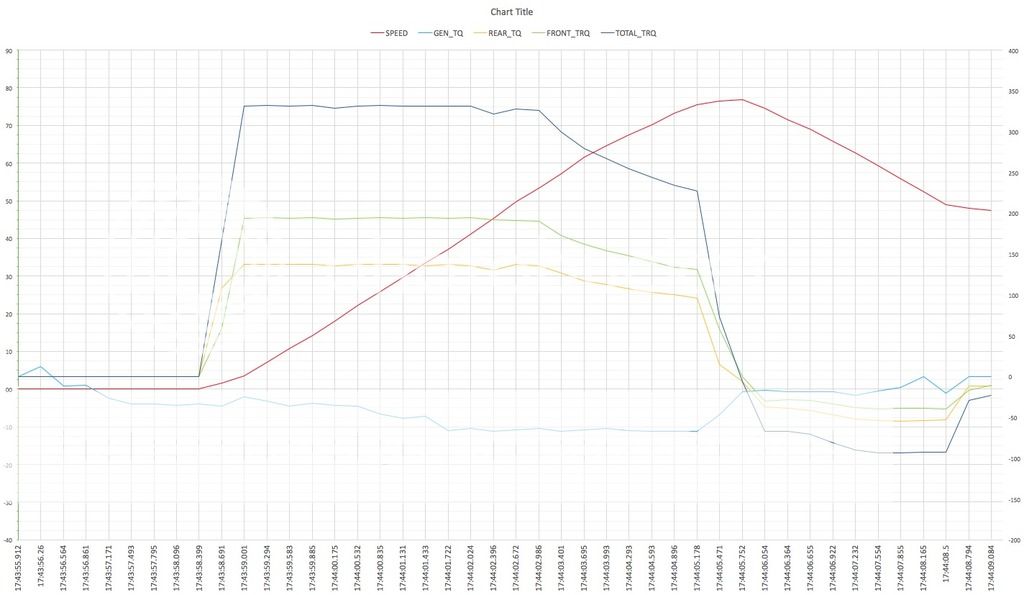
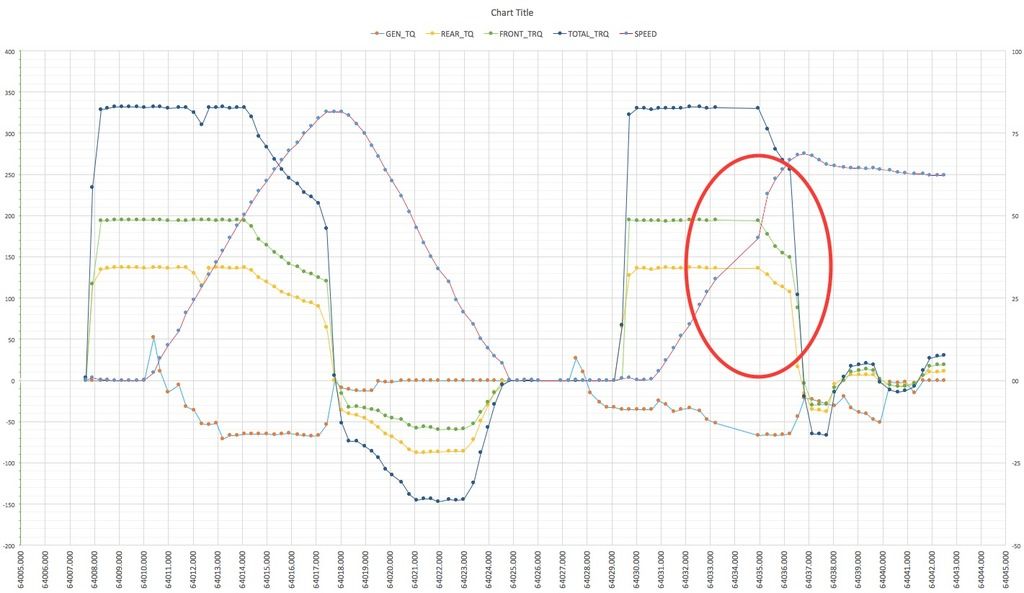
You see that torque builds up very quickly to maximum and stays at maximum at least until I hit 52 km/h. Next reading is 58 km/h and there torque is dropping as max power has been reached.
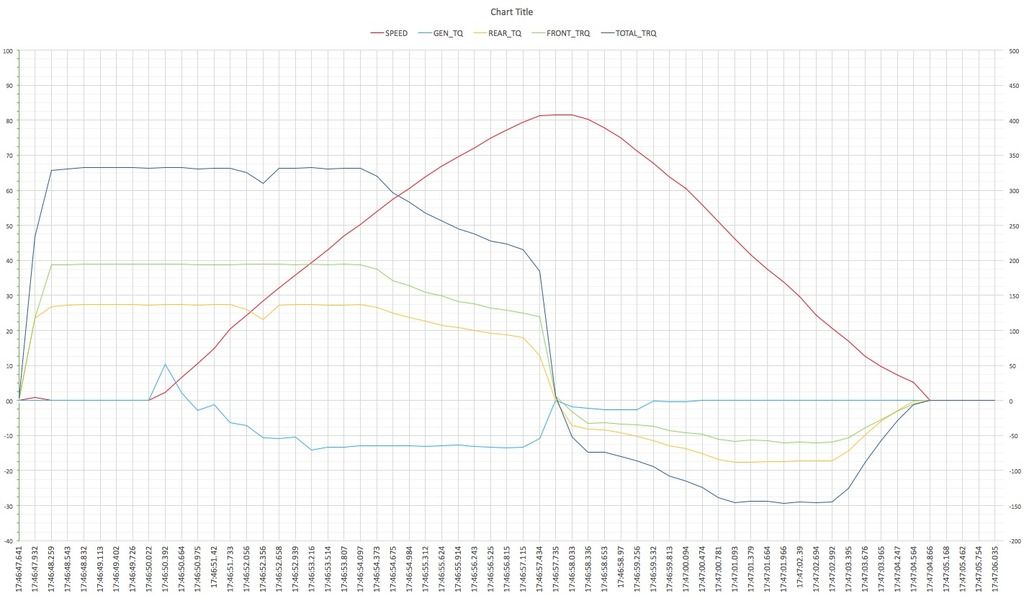
Second attempt:
- Engine warmed up and NOT running
- Foot on the brake
- Then move foot away from brake to throttle and hit it as hard as possible
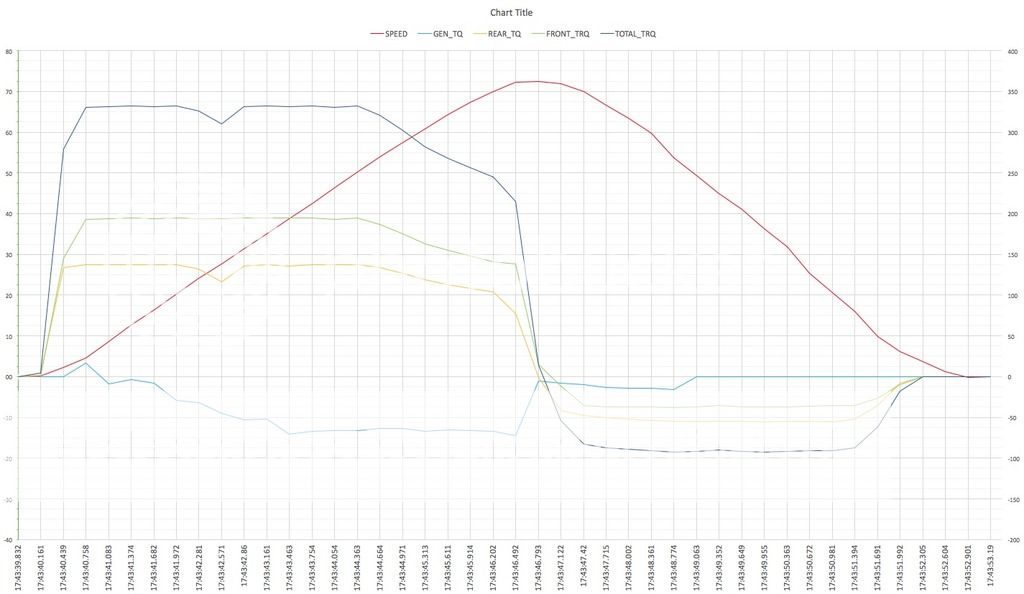
You see a dip in Rear motor Torque around 25 km/h as the battery is fully utilised and the generator is still ramping up. Interestingly enough, the Front motor keeps going full torque, where the rear motor must wait for the additional power form the generator to arrive.
The engine is started within approx. 0.5 seconds after slamming the throttle, even though the battery has enough power to manage the first full 2 seconds by itself.
Third attempt:
- Engine warmed up and running (the teal trace shows how the generator is used to start the engine (spike up) and then starts producing power.
- Foot on the brake
- Other foot full on the throttle
- Then let go off the brake
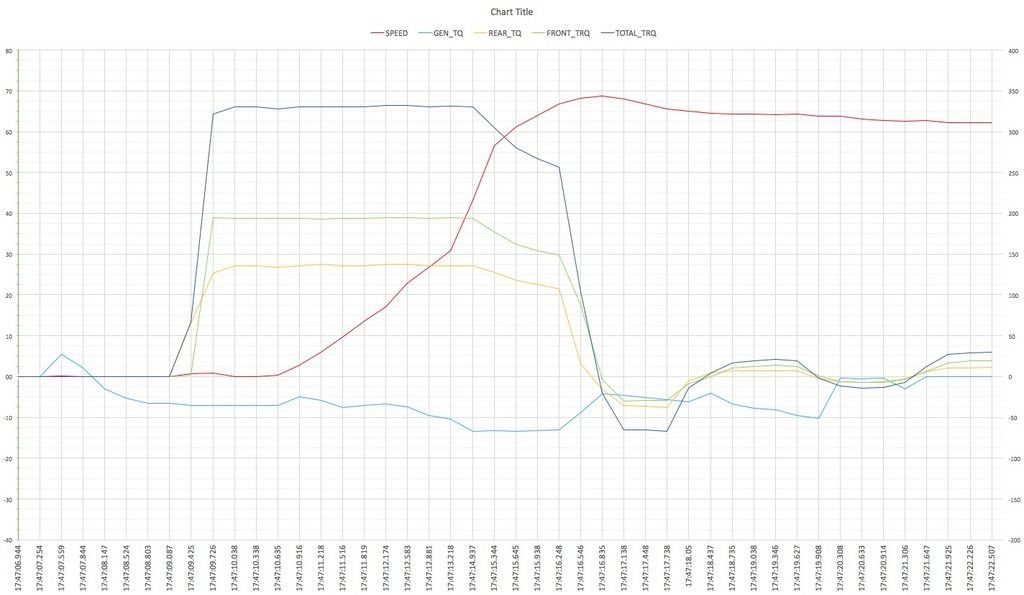
You see how torque builds up to max before taking off.
The apparent increase of acceleration is caused by the fact that measurements are further apart. Too bad!
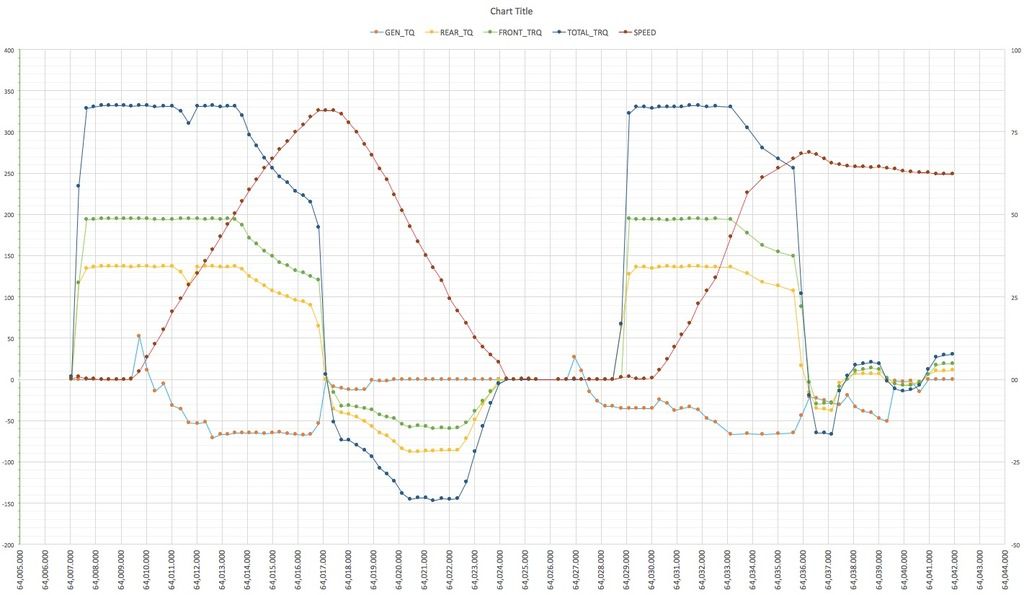
Fourth attempt:
- Engine warmed up and NOT running (the teal trace shows how the generator is used to start the engine (spike up) and then starts producing power.
- Foot on the brake
- Other foot full on the throttle
- Then let go off the brake
Again, torque build up to max before taking off. But engine is started only just after take off.
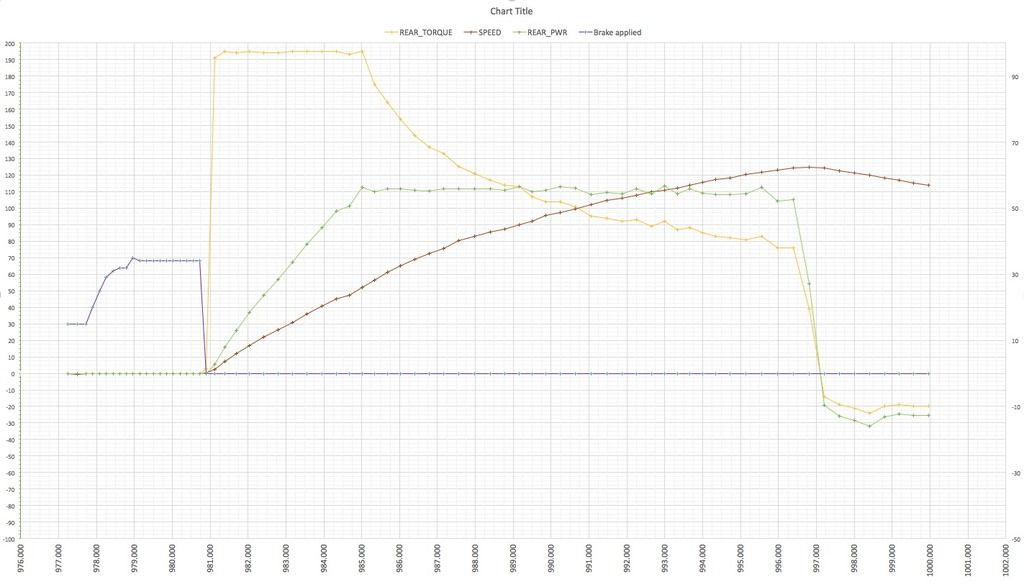
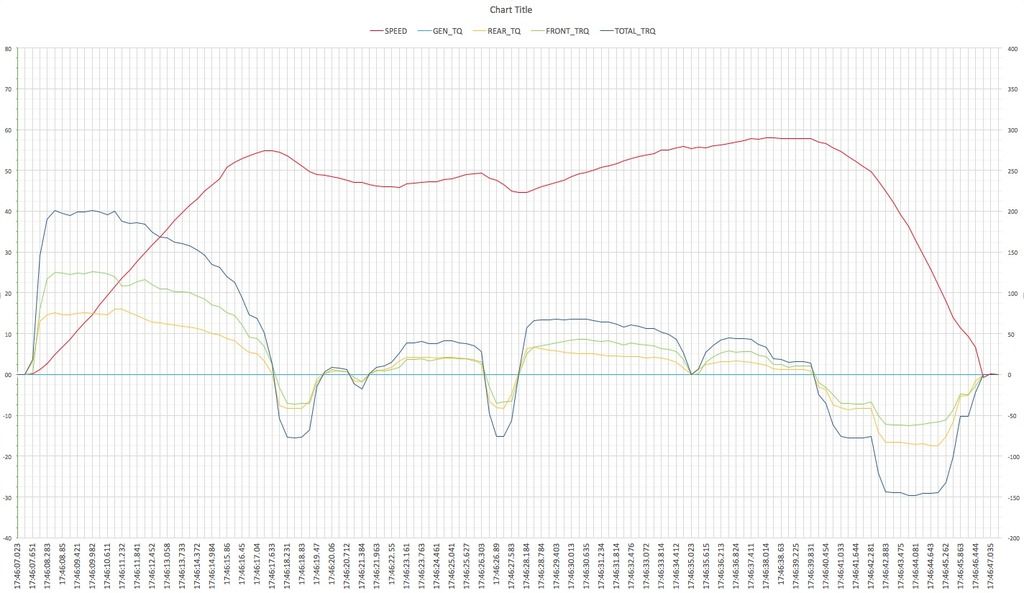
Last picture show a random section of driving. All within EV range:
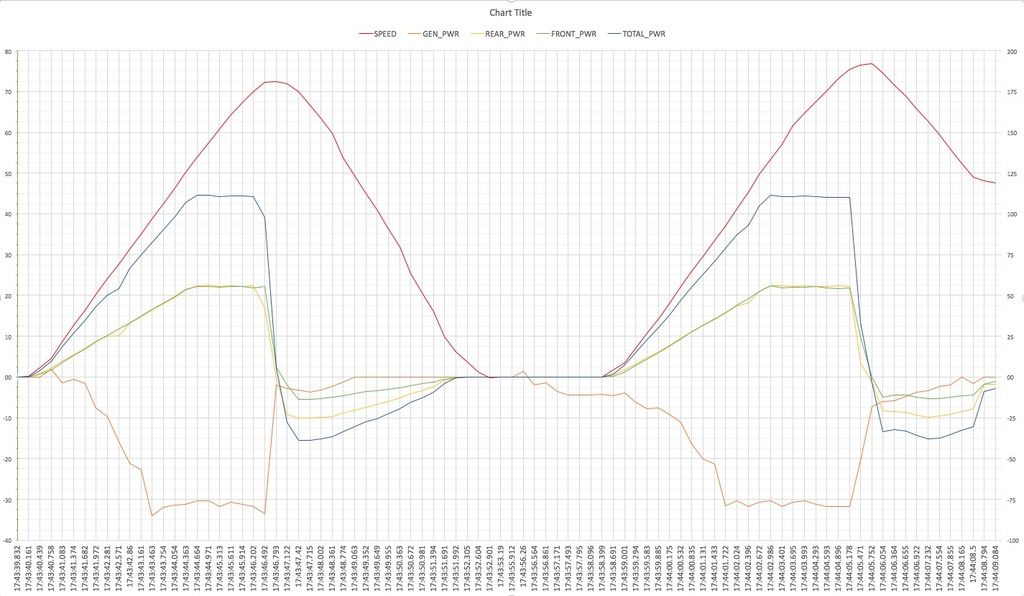
Tomorrow, I'll add same set of graphs, showing kW instead of Nm.
- Front motor RPM
- Front motor Torque
- Rear motor RPM
- Rear motor Torque
- Generator RPM
- Generator Torque
By making this dedicated, I could reduce my sweep time to about a third of a second, resulting in some interesting pictures.
First attempt:
- Engine warmed up and running (the teal trace shows how the generator is used to start the engine (spike up) and then starts producing power.
- Foot on the brake
- Then move foot away from brake to throttle and hit it as hard as possible
You see that torque builds up very quickly to maximum and stays at maximum at least until I hit 52 km/h. Next reading is 58 km/h and there torque is dropping as max power has been reached.
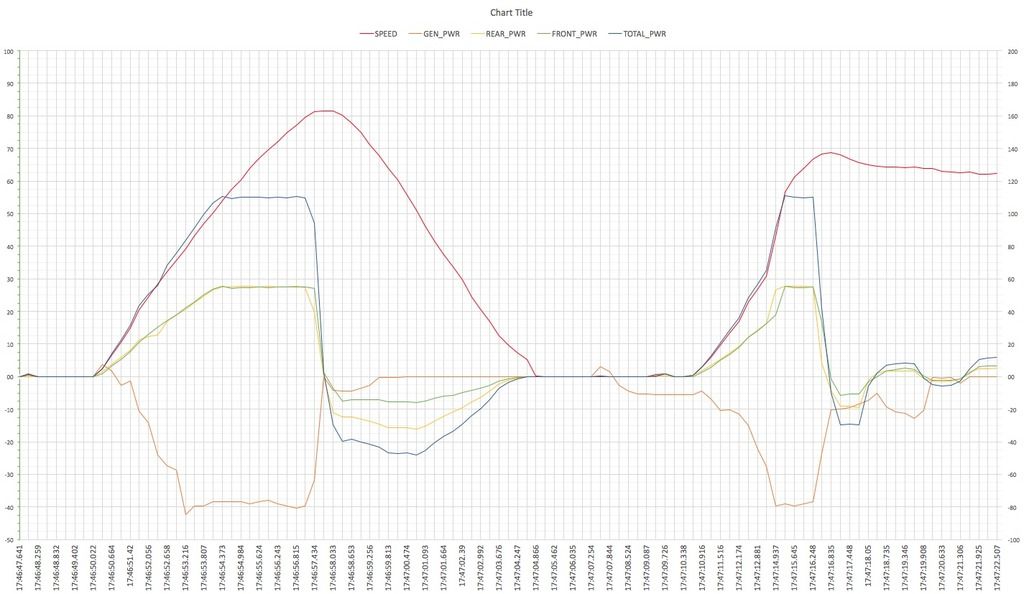
Second attempt:
- Engine warmed up and NOT running
- Foot on the brake
- Then move foot away from brake to throttle and hit it as hard as possible
You see a dip in Rear motor Torque around 25 km/h as the battery is fully utilised and the generator is still ramping up. Interestingly enough, the Front motor keeps going full torque, where the rear motor must wait for the additional power form the generator to arrive.
The engine is started within approx. 0.5 seconds after slamming the throttle, even though the battery has enough power to manage the first full 2 seconds by itself.
Third attempt:
- Engine warmed up and running (the teal trace shows how the generator is used to start the engine (spike up) and then starts producing power.
- Foot on the brake
- Other foot full on the throttle
- Then let go off the brake
You see how torque builds up to max before taking off.
The apparent increase of acceleration is caused by the fact that measurements are further apart. Too bad!
Fourth attempt:
- Engine warmed up and NOT running (the teal trace shows how the generator is used to start the engine (spike up) and then starts producing power.
- Foot on the brake
- Other foot full on the throttle
- Then let go off the brake
Again, torque build up to max before taking off. But engine is started only just after take off.
Last picture show a random section of driving. All within EV range:
Tomorrow, I'll add same set of graphs, showing kW instead of Nm.