anko
Well-known member
Hi there,
Yesterday, I have done a very extensive "test drive". Dragged my caravan into the Dutch hills in Limburg (approx. 180 km to get there), drove around for an hour or three with two professionals that are specialised into modelling expected performance of tow cars. They were very interested to test drive my car, as their theoretical models do not support a car like ours. After that, I dragged the caravan back home again. Total distance covered was over 400 km. How is that for saving fuel :mrgreen: BTW: Total fuel consumption, including all testing, was 13 l / 100 km. Totally happy with that.
We did lots of normal driving but also a series of hill starts (although slopes are short in the Dutch hills, gradients up to 17% can be found in that region).
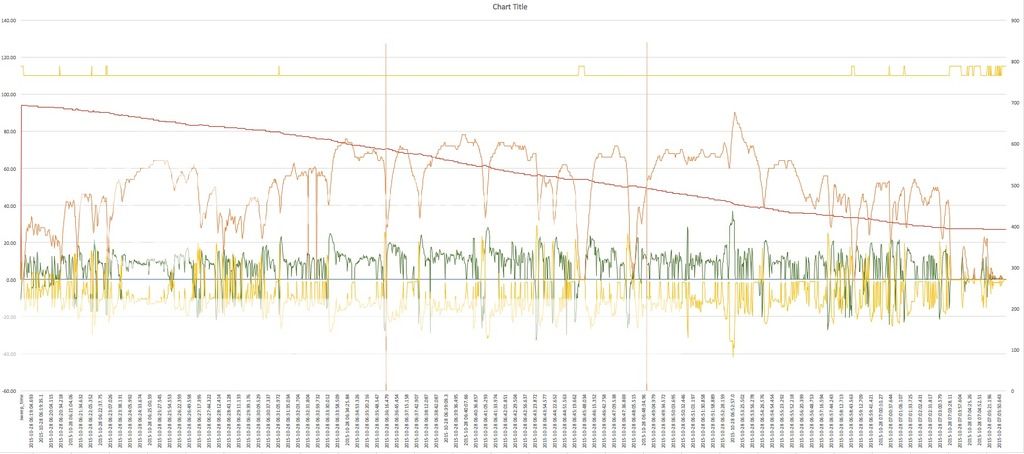
All the time I had Torque Pro running, using my protocol converter. I have been logging lots of data into CSV files and captured this into a consolidated XLS in which I did some post processing: https://www.dropbox.com/s/x04sypacg3by4ww/Towtrip no formulas.xlsx?dl=0 (sorry, it is rather big). Most of the stuff is self explanatory.
Column H is how much of torque available at given RPM is actually produced.
You must realise one cannot read out all parameters from all different ECU's at the exact same time. This difference is reflected in columns A and B of the XLS: A is the time at which a sweep of all requests was started, B is when the response for a particular request was actually received. This means that, for instance, received values for front and rear motor are a little bit shifted (as little as 150 msec).
Although this time difference is very small (a full sweep is generally perfromed in approx. 1 second), you might find that within a single sweep, one motor shows to be propelling the car, while the other shows to be slowing down the car. Where this happens, column V (which shows how much of the total electric power is coming from the rear motor), will show +/-, to flag that calculating power distribution is meaningless at that moment. When there is no power delivered at all by both E-motors, column V shows NOP (no power).
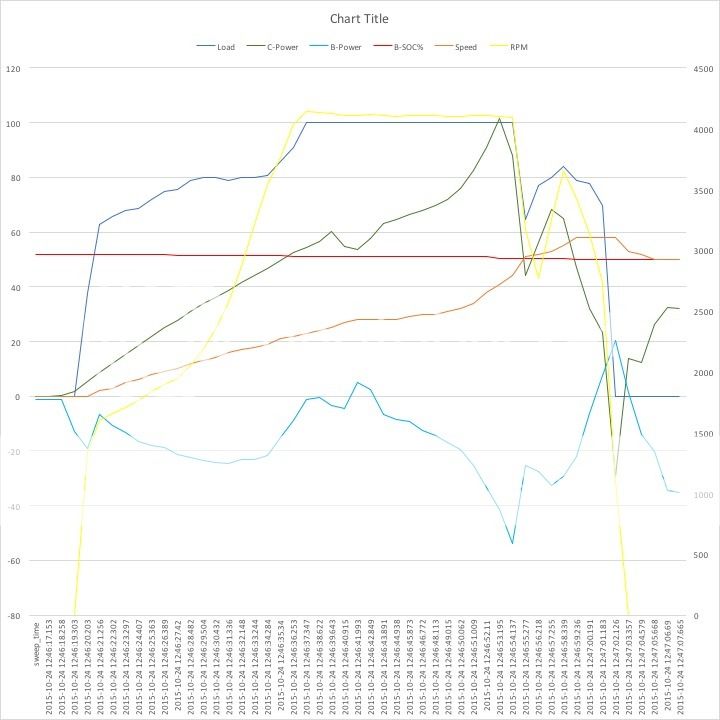
One interesting thing my data shows is that even with a depleted battery, you still have a lot of grunt left. When I got off the motorway, SOC was down to approx. 25%. I had 7 km of 50 MPH road to cover. At the first traffic light, I got into that fast lane ( ) to get ahead of other slower traffic. On the next 7 km of 50 MPH road, I did several 40 - 60 MPH sprints, totally wrecking my SOC. At row 1862310, you can see that even at 23% SOC, I still get >108 kW from the E-motors.
) to get ahead of other slower traffic. On the next 7 km of 50 MPH road, I did several 40 - 60 MPH sprints, totally wrecking my SOC. At row 1862310, you can see that even at 23% SOC, I still get >108 kW from the E-motors.
Questions? Shoot!
Next step is to build some nice graphs based on this data. TBC.
Yesterday, I have done a very extensive "test drive". Dragged my caravan into the Dutch hills in Limburg (approx. 180 km to get there), drove around for an hour or three with two professionals that are specialised into modelling expected performance of tow cars. They were very interested to test drive my car, as their theoretical models do not support a car like ours. After that, I dragged the caravan back home again. Total distance covered was over 400 km. How is that for saving fuel :mrgreen: BTW: Total fuel consumption, including all testing, was 13 l / 100 km. Totally happy with that.
We did lots of normal driving but also a series of hill starts (although slopes are short in the Dutch hills, gradients up to 17% can be found in that region).
All the time I had Torque Pro running, using my protocol converter. I have been logging lots of data into CSV files and captured this into a consolidated XLS in which I did some post processing: https://www.dropbox.com/s/x04sypacg3by4ww/Towtrip no formulas.xlsx?dl=0 (sorry, it is rather big). Most of the stuff is self explanatory.
Column H is how much of torque available at given RPM is actually produced.
You must realise one cannot read out all parameters from all different ECU's at the exact same time. This difference is reflected in columns A and B of the XLS: A is the time at which a sweep of all requests was started, B is when the response for a particular request was actually received. This means that, for instance, received values for front and rear motor are a little bit shifted (as little as 150 msec).
Although this time difference is very small (a full sweep is generally perfromed in approx. 1 second), you might find that within a single sweep, one motor shows to be propelling the car, while the other shows to be slowing down the car. Where this happens, column V (which shows how much of the total electric power is coming from the rear motor), will show +/-, to flag that calculating power distribution is meaningless at that moment. When there is no power delivered at all by both E-motors, column V shows NOP (no power).
One interesting thing my data shows is that even with a depleted battery, you still have a lot of grunt left. When I got off the motorway, SOC was down to approx. 25%. I had 7 km of 50 MPH road to cover. At the first traffic light, I got into that fast lane (
) to get ahead of other slower traffic. On the next 7 km of 50 MPH road, I did several 40 - 60 MPH sprints, totally wrecking my SOC. At row 1862310, you can see that even at 23% SOC, I still get >108 kW from the E-motors.Questions? Shoot!
Next step is to build some nice graphs based on this data. TBC.